Jeyffreys : Une alternative oubliée au test de significativté
Conclusion
Contexte
Définition
La statistique est la discipline qui étudie des phénomènes à travers la collecte de données, leur traitement, leur analyse, l’interprétation des résultats et leur présentation afin de rendre ces données compréhensibles par tous. (wikipedia)
Contexte
Définition
La statistique est la discipline qui étudie des phénomènes à travers la collecte de données, leur traitement, leur analyse, l’interprétation des résultats et leur présentation afin de rendre ces données compréhensibles par tous. (wikipedia)
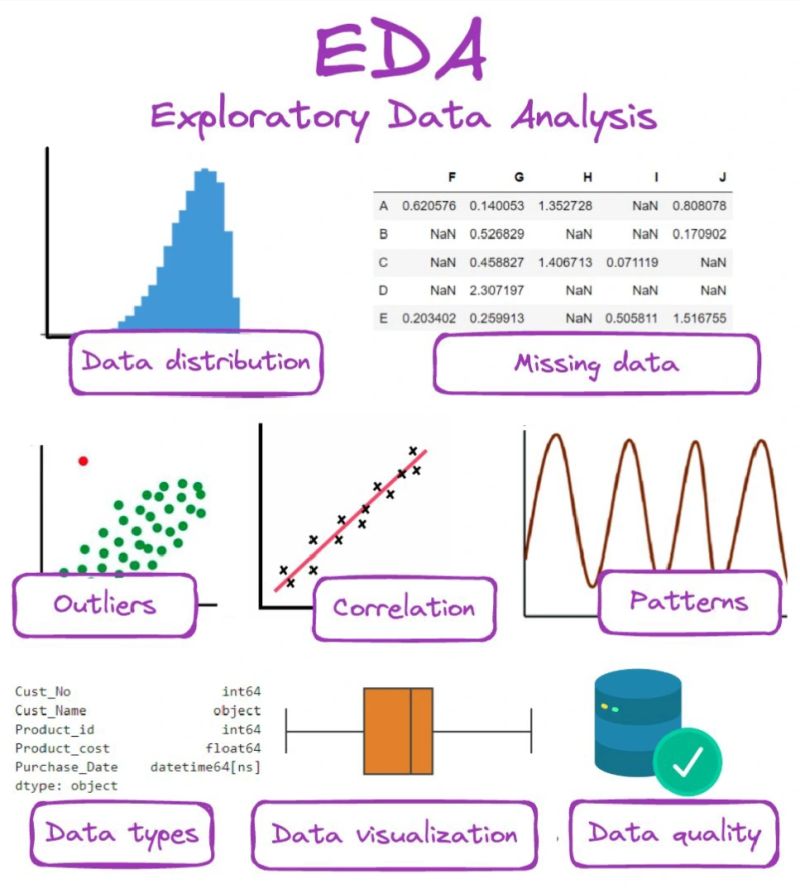
Statistiques descriptives
On analyse un échantillon d’une population (moyenne, variance, outliers…)
Contexte
Définition
La statistique est la discipline qui étudie des phénomènes à travers la collecte de données, leur traitement, leur analyse, l’interprétation des résultats et leur présentation afin de rendre ces données compréhensibles par tous. (wikipedia)
Statistiques descriptives
On analyse un échantillon d’une population (moyenne, variance, outliers…)
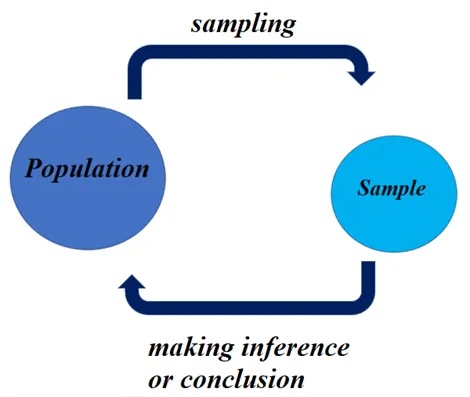
Statistiques inférentielles
A partir d’un échantillon d’une population, on tire des conclusions sur cette population
Contexte
Fisher : Test de significativité (1925-1935)
Sir Ronald Fisher (1890-1962)
Généticien et statisticien britannique unanimement reconnu pour avoir révolutionné la statistique.
Le but du test est de donnée une chance au données d’invalider une hypothèse.
Une seule hypothèse nommée hypothèse nulle (to be nullified) notée \(H_0\)
On doit connaître la distribution d’échantillonnage sous l’hypothèse nulle \(P(_~|~H_0)\) pour calculer la probabilité d’observer une valeur au moins aussi extrême que celle observée dans l’échantillon
Si cette probabilité est faible, on rejette l’hypothèse nulle( seuil de significativité arbitraire)
pas d’hypothèse alternative
Il n’existe que l’erreur de type I, rejeter l’hypothèse nulle alors qu’elle est vraie
Contexte
Neyman et Pearson : Test d’hypothèses (1928-1933)
Jerzy Neyman (1894-1981)
Egon Pearson (1895-1980)
Jerzy Neyman mathématicien et statisticien d’origine polonaise. Egon Pearson statisticien britanique
Ce test concerne la prise de décision rationnelle sur des hypothèses statistiques
Mise en avant de la nécessité d’une hypothèse alternative notée \(H_1\) (complémentaires de \(H_0\))
Le test définit une région de rejet et une région d’acceptation de \(H_0\)
Le rôle du test est de minimiser sur le long terme la proportion de décisions erronées
Il existe deux types d’erreurs :
type I : rejeter \(H_0\) alors qu’elle est vraie (noté \(\alpha\))
type II : accepter \(H_0\) alors qu’elle est fausse (noté \(\beta\))
La puissance d’une région est la probabilité de rejeter \(H_0\) quand \(H_1\) est vraie (égale à \(1-\beta\))
Contexte
Inférence fréquentiste aujourd’hui
Une logique hybride
La norme en vigueur est un amalgame de différentes procédures plus ou moins compatibles :
La conception décisionnelle des tests d’hypothèse de Neyman et Pearson (Hypothèse alternative et puissance).
La conception du test de significativité de Fisher (Hypothèse nulle et seuil de significativité)
l’utilisation d’intervalles de confiance
Contexte
Inférence fréquentiste aujourd’hui
Une logique hybride
La norme en vigueur est un amalgame de différentes procédures plus ou moins compatibles :
La conception décisionnelle des tests d’hypothèse de Neyman et Pearson (Hypothèse alternative et puissance).
La conception du test de significativité de Fisher (Hypothèse nulle et seuil de significativité)
l’utilisation d’intervalles de confiance
Les faiblesses de l’approche
La p-value suscite de nombreuses critiques :
la valeur de seuil de significativité est arbitraire
La p_value génère un biais de publication
cette approche conduit toujours à une décision par la négative, l’hypothèse nulle est souvent la négation de l’hypothèse d’intérêt
la p-value est sensible à la taille de l’échantillon (paradoxe de Lindley)
Confusion entre significativité et taille d’effet : la p_value représente \(P(E|H_0)\) et non \(P(H_0|E)\)
Contexte
Jeyffreys : Une alternative “oubliée” au test de significativté (1939)
Sir Harold Jeffreys (1891-1989)
Géophysicien britannique Considéré comme la première tentative de développer une théorie formelle de l’inférence statistique basée sur l’approche bayésienne
Ce test permet de compare deux hypothèses, une valeur précise d’un paramètre contre toutes les autres valeurs possibles
Il fait l’hypothèse que ces deux hypothèses sont équiprobables
Il s’intéresse aux probabilités a posteriori \(P(H_0|E)\) et \(P(H_1|E)\) (E sont les observations)
Et plus particulièrement à leur rapport\(P(H_0|E)/P(H_1|E)\) nommé le facteur de Bayes
Il ne cherche donc pas à nullifier une hypothèse
Les deux hypothèses ne doivent pas nécessairement être complémentaires
Contexte
Conclusion
L’approche fréquentiste se focalise sur la fiabilité des procédures qui engendrent les résultats :
erreur de type I : on accepte de valider \(H_1\) à tort dans 5% des cas
erreur de type II : on accepte de rejeter \(H_1\) à tort dans 20% des cas
intervalle de confiance : on accepte que la vraie valeur du paramètre ne soit pas dans l’intervalle de confiance dans 5% des cas
Contexte
Conclusion
L’approche fréquentiste se focalise sur la fiabilité des procédures qui engendrent les résultats :
erreur de type I : on accepte de valider \(H_1\) à tort dans 5% des cas
erreur de type II : on accepte de rejeter \(H_1\) à tort dans 20% des cas
intervalle de confiance : on accepte que la vraie valeur du paramètre ne soit pas dans l’intervalle de confiance dans 5% des cas
L’approche bayésienne se focalise sur la crédibilité des hypothèses au regard des observations \(P(H|E)\)
Contexte
Conclusion
L’approche fréquentiste se focalise sur la fiabilité des procédures qui engendrent les résultats :
erreur de type I : on accepte de valider \(H_1\) à tort dans 5% des cas
erreur de type II : on accepte de rejeter \(H_1\) à tort dans 20% des cas
intervalle de confiance : on accepte que la vraie valeur du paramètre ne soit pas dans l’intervalle de confiance dans 5% des cas
L’approche bayésienne se focalise sur la crédibilité des hypothèses au regard des observations \(P(H|E)\)
Alors pourquoi cette approche n’est pas l’approche dominante ?
Pour répondre il faut d’abord comprendre les grands principes de l’inférence bayésienne…
Plan du cours
Contexte
L’inférence bayésienne
Cas pratiques
Pour aller plus loin
Grands principes
Théorème de Bayes
Les priors
La distribution postérieure
Un exemple
L’inférence bayésienne
Grands principes
L’hypothèse de base de l’inférence bayésienne est que la probabilité doit-être interprétée comme un degré de croyance rationnelle.
L’inférence bayésienne
Grands principes
L’hypothèse de base de l’inférence bayésienne est que la probabilité doit-être interprétée comme un degré de croyance rationnelle.
L’inférence bayésienne est associée aux trois principes suivants :
Les degrés de croyance sont représentés par des probabilités
La révision des degrés de croyance est régie par l’utilisation le théorème de Bayes
L’évaluation des hypothèses et les prises de décision reposent uniquement sur la distribution a posteriori \(P(H|E)\) où \(E\) représente les observations et \(H\) les hypothèses
L’inférence bayésienne
Théorème de Bayes
Considérons des hypothèses \(H\) et des observations (evidence) \(E\).
Par exemple :
\(H\) : la pièce lancée est équilibrée
\(E\) : la pièce est tombée 5 fois sur pile
Ce qui nous intéresse c’est la distribution de probabilité conjointe d’avoir ces évènements et cette hypothèse :
\[P(H,E)\]
L’inférence bayésienne
Théorème de Bayes
Considérons des hypothèses \(H\) et des observations (evidences) \(E\). Ce qui nous intéresse c’est la distribution de probabilité conjointe d’avoir ces évènements et ces hypothèses :
\[P(H,E)\]
On peut décomposer cette distribution conjointe en utilisant les probabilités conditionnelles. Deux manières possibles :
En passant par la probabilité des hypothèses sachant les observations : \[P(H,E) = P(H|E)P(E)\]
Autrement dit la probabilité que la pièce soit équilibrée sachant qu’elle a été lancée 5 fois sur pile, multipliée par la probabilité d’avoir 5 fois pile (dans l’absolue)
L’inférence bayésienne
Théorème de Bayes
Considérons des hypothèses \(H\) et des observations (evidences) \(E\). Ce qui nous intéresse c’est la distribution de probabilité conjointe d’avoir ces évènements et ces hypothèses :
\[P(H,E)\]
On peut décomposer cette distribution conjointe en utilisant les probabilités conditionnelles. Deux manières possibles :
En passant par la probabilité des hypothèses sachant les observations : \[P(H,E) = P(H|E)P(E)\]
En passant par la probabilité des observations sachant les hypothèses : \[P(H,E) = P(E|H)P(H)\]
Cette fois en considérant la probabilité d’avoir lancé 5 fois sur pile sachant que la pièce est équilibrée, multipliée par la probabilité que la pièce soit équilibrée
L’inférence bayésienne
Théorème de Bayes
Considérons une hypothèse \(H\) et des observations (evidence) \(E\).
En combinant les deux égalités précédentes, on obtient le théorème de Bayes :
\[P(H|E) = P(H) \frac{P(E|H)}{P(E)}\]
Ce théorème permet de passer de la connaissance de l’hypothèse avant d’avoir vu les observations\(P(H)\) à la probabilité a posteriori des hypothèses, une fois les observations prise en compte \(P(H|E)\)
L’inférence bayésienne
Théorème de Bayes
Considérons une hypothèse \(H\) et des observations (evidence) \(E\). En combinant les deux égalités précédentes, on obtient le théorème de Bayes :
\[P(H|E) = P(H) \frac{P(E|H)}{P(E)}\]
Mais cette démarche met en évidence deux difficultés :
La connaissance a priori de la probabilité des hypothèses \(P(H)\)
Le calcul de la probabilité des observations \(P(E)\) ( la constante de normalisation)
L’inférence bayésienne
Les priors
Au début du XX ème siècle, l’idéal dominant est que la science doit aspirer à la certitude et fournir une vision objective et impartiale de la réalit.
La notion de prior “forcément” subjectif conduira au rejet de l’approche bayésienne
Il existe aujourd’hui trois propositions de piors
L’inférence bayésienne
Les priors
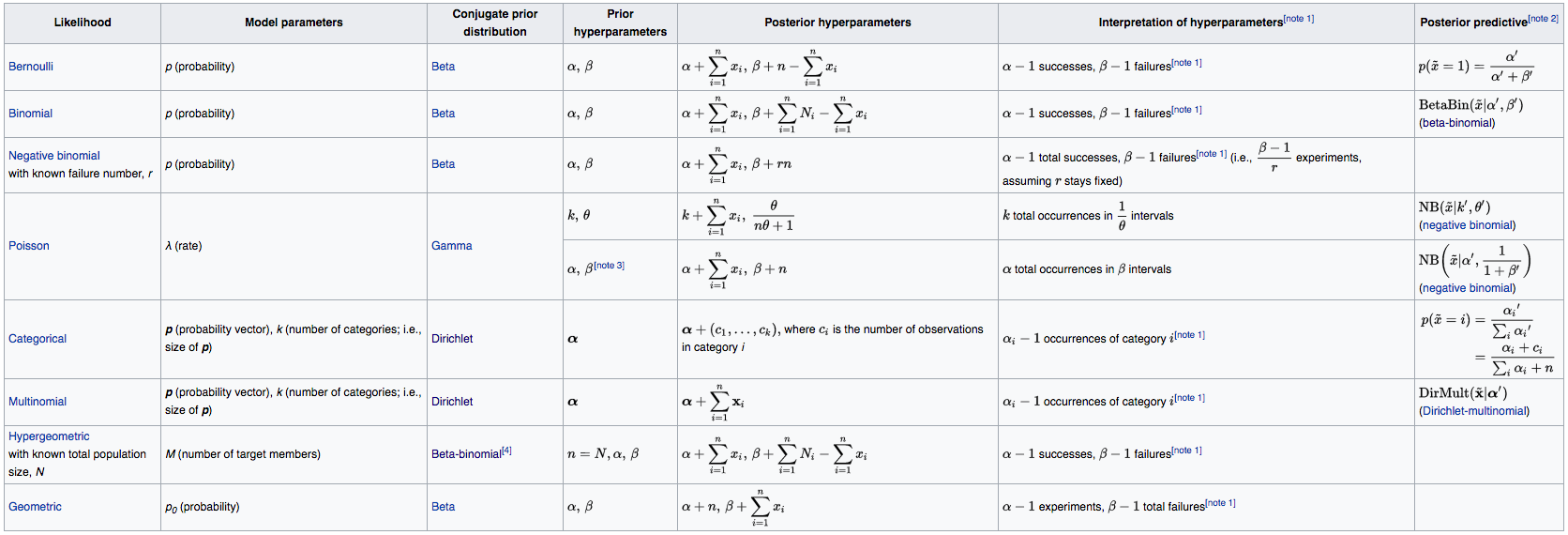
Les priors conjugués (solution analytique)
Ces priors permettent de calculer analytiquement la distribution postérieure.
L’inférence bayésienne
Les priors
Les priors non informatifs :
Un prior non informatif est une distribution de probabilité qui a pour but d’avoir une influence minimale sur les résultats de l’analyse.
Cela permet aux données observées de jouer un rôle plus déterminant dans la formation des conclusions.
Utilisés pour caractériser une absence d’information préalable.
Un exemple est un prior uniforme sur un intervalle de valeurs.
L’inférence bayésienne
Les priors
Les priors non informatifs :
Un prior non informatif est une distribution de probabilité qui a pour but d’avoir une influence minimale sur les résultats de l’analyse.
Cela permet aux données observées de jouer un rôle plus déterminant dans la formation des conclusions.
Utilisés pour caractériser une absence d’information préalable.
Un exemple est un prior uniforme sur un intervalle de valeurs.
Cette notion de prior non informatif est souvent attribuée à Harold Jeffreys.
L’inférence bayésienne
Les priors
Les priors faiblement informatifs
Un prior faiblement informatif est une distribution de probabilité qui a pour but d’avoir une influence minimale sur les résultats, tout en facilitant les calculs de la distribution postérieure.
Un exemple : on considère un modèle de régression linéaire avec deux priors, un pour le paramètre lié à la moyenne et un pour la variance. Un prior faiblement informatif sera une distribution de probabilité sur les valeurs positives, comme une distribution exponentielle ou half-Normale.
L’inférence bayésienne
Les priors
Les priors faiblement informatifs
Un prior faiblement informatif est une distribution de probabilité qui a pour but d’avoir une influence minimale sur les résultats, tout en facilitant les calculs de la distribution postérieure.
Un exemple : on considère un modèle de régression linéaire avec deux priors, un pour le paramètre lié à la moyenne et un pour la variance. Un prior faiblement informatif sera une distribution de probabilité sur les valeurs positives, comme une distribution exponentielle ou half-Normale.
Cette notion de prior faiblement informatif a été popularisé par Andrew Gelman.
Il est également à la base du logiciel STAN qui est un des premiers outils de modélisation bayésienne.
L’inférence bayésienne
La distribution postérieure
On a vu que le prise de décision doit repose sur la seule distribution postérieure. Problème : Dans la majeure partie des cas, la distribution postérieure n’est pas calculable analytiquement.
L’évolution des capacités de calculs a permis de développer des méthodes d’inférence bayésienne qui permettent de calculer la distribution postérieure de manière approchée.
Voici deux méthodes d’inférence bayésienne
L’inférence bayésienne
La distribution postérieure
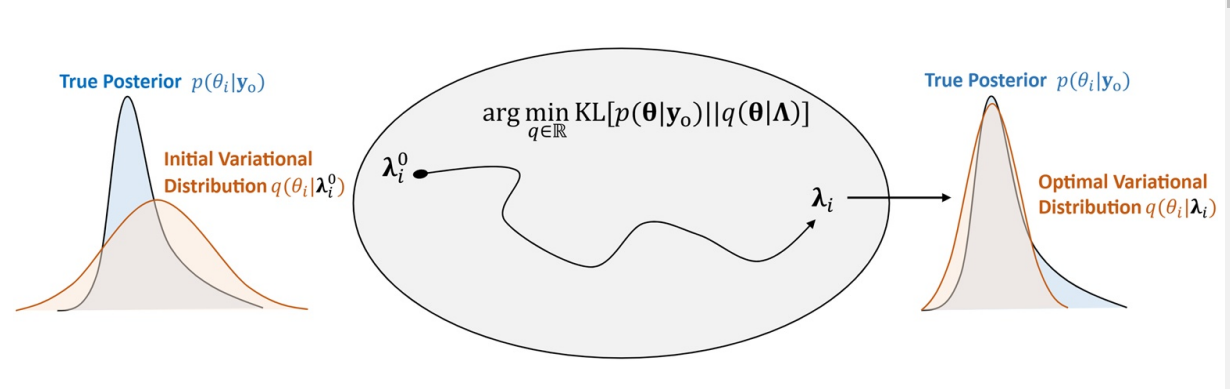
Stochastic Variational Inference 1
Cette méthode est rapide et précise. Cependant, sa précision peu se dégrader en fonction des choix de famille de distribution et de la dimension du problème.
L’inférence bayésienne
La distribution postérieure
Markov Chain Monte Carlo
Cette méthode est la plus robuste. Cependant, elle peut devenir lente avec l’augmentation des dimensions.
L’inférence bayésienne
La distribution postérieure
exemple : Hamiltonian Monte Carlo
Cette méthode a beaucoup évoluée et est adaptée à toute sorte de distribution sur les paramètres.
L’inférence bayésienne
Bilan de la démarche
Poser la question d’intérêt clairement
Formuler les hypothèses et en déduire
les variables prédictrices (variables indépendantes)
les variables prédites (variables dépendantes)
les variables non mesurées (mais influentes)
L’inférence bayésienne
Bilan de la démarche
Poser la question d’intérêt clairement
Définir le modèle génératif
Comment sont générées les données
La VD évolue avec les VIs \(\to\) modèle linéaire
La VD est binaire \(\to\) modèle logistique
La VD est un temps d’attente \(\to\) modèle de poisson
…
L’inférence bayésienne
Bilan de la démarche
Poser la question d’intérêt clairement
Définir le modèle génératif
Implémenter le modèle et calculer la postérieure
Implémentation
Construire le modèle
Définir les priors
Faire tourner l’inférence
Vérifier l’algorithme
L’inférence bayésienne
Bilan de la démarche
Poser la question d’intérêt clairement
Définir le modèle génératif
Implémenter le modèle et calculer la postérieure
Confronter le résultat à la réalité
Vérification et consolidation
Visualiser les résultats
Boucler en modifiant le modèle jusqu’à obtenir un résultat satisfaisant
L’inférence bayésienne
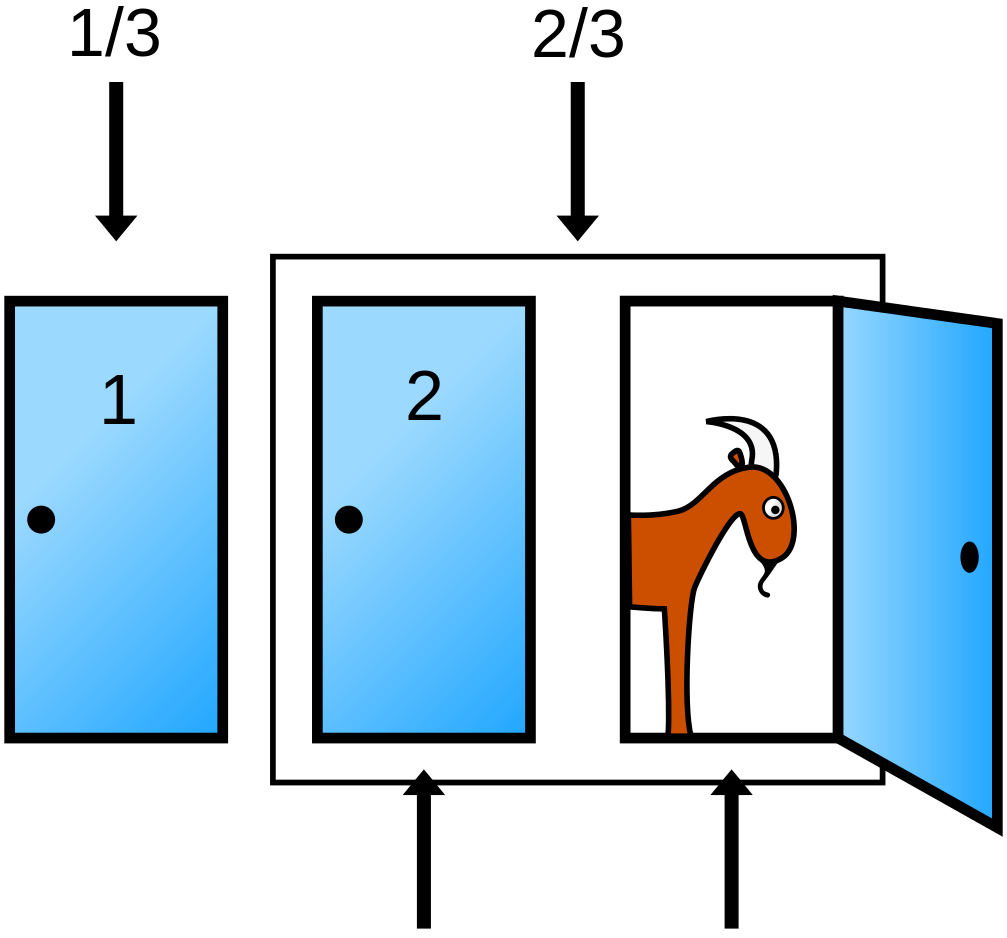
Un exemple : Le problème de Monty Hall
Le joueur a-t-il intérêt à changer de porte ?
Formuler le problème de manière “bayésienne”
Définir la distribution a priori
Définir la fonction de vraisemblance
Appliquer le théorème Bayes
Le résultat était-il intuitif ?
L’inférence bayésienne
Un exemple : Le problème de Monty Hall
Posons le problème de manière bayésienne :
L’espace des probabilité est conditionné par le fait que le joueur a choisi la porte A
L’hypothèse \(H\) que l’on considère est : La voiture se trouve dernière la porte A, B ou C
La donnée \(E\) est : l’animateur a ouvert la porte C
Question : Quelle est la distribution a posteriori (que la voiture soit derrière une des deux porte restante) ?
\[P(H|D) ?\]
L’inférence bayésienne
Un exemple : Le problème de Monty Hall
Définissons la distribution a priori :
\[P(H~|~E) = \frac{P(E~|~H)~P(H)}{P(E)}\]
Calcul du prior\(P(H)\) : Probabilité que la voiture soit derrière les portes A, B ou C. -> On n’a pas d’information particulière donc on choisit un prior non informatif (distribution uniforme).
Monty Hall.
H
\(P(H)\)
$P(E|H)$
$P(H|E)$
porte A
1/3
porte B
1/3
porte C
1/3
L’inférence bayésienne
Un exemple : Le problème de Monty Hall
Posons le problème de manière bayésienne :
\[P(H~|~E) = \frac{P(E~|~H)~P(H)}{P(E)}\]
Calcul de la vraisemblance\(P(E~|~H)\) : Probabilité que l’animateur ouvre la porte C sachant que le joueur a choisi la porte A et que la voiture se trouve derrière la porte H.
Monty Hall.
H
\(P(H)\)
$P(E|H)$
$P(H|E)$
porte A
1/3
1/2
porte B
1/3
1
porte C
1/3
0
L’inférence bayésienne
Un exemple : Le problème de Monty Hall
Posons le problème de manière bayésienne :
\[P(H~|~E) = \frac{P(E~|~H)~P(H)}{P(E)}\]
\(P(H|E)\) : Probabilité postérieure de chaque porte sachant que l’animateur ouvre la porte C sachant que le joueur a choisi la porte A.
Monty Hall.
H
\(P(H)\)
$P(E|H)$
$P(H|E)$
porte A
1/3
1/2
1/3
porte B
1/3
1
2/3
porte C
1/3
0
0
Plan du cours
Contexte
L’inférence bayésienne
Cas pratiques
Pour aller plus loin
EDA
Estimation de paramètres
Test d’hypothèse
Comparaison de modèles
Cas pratiques
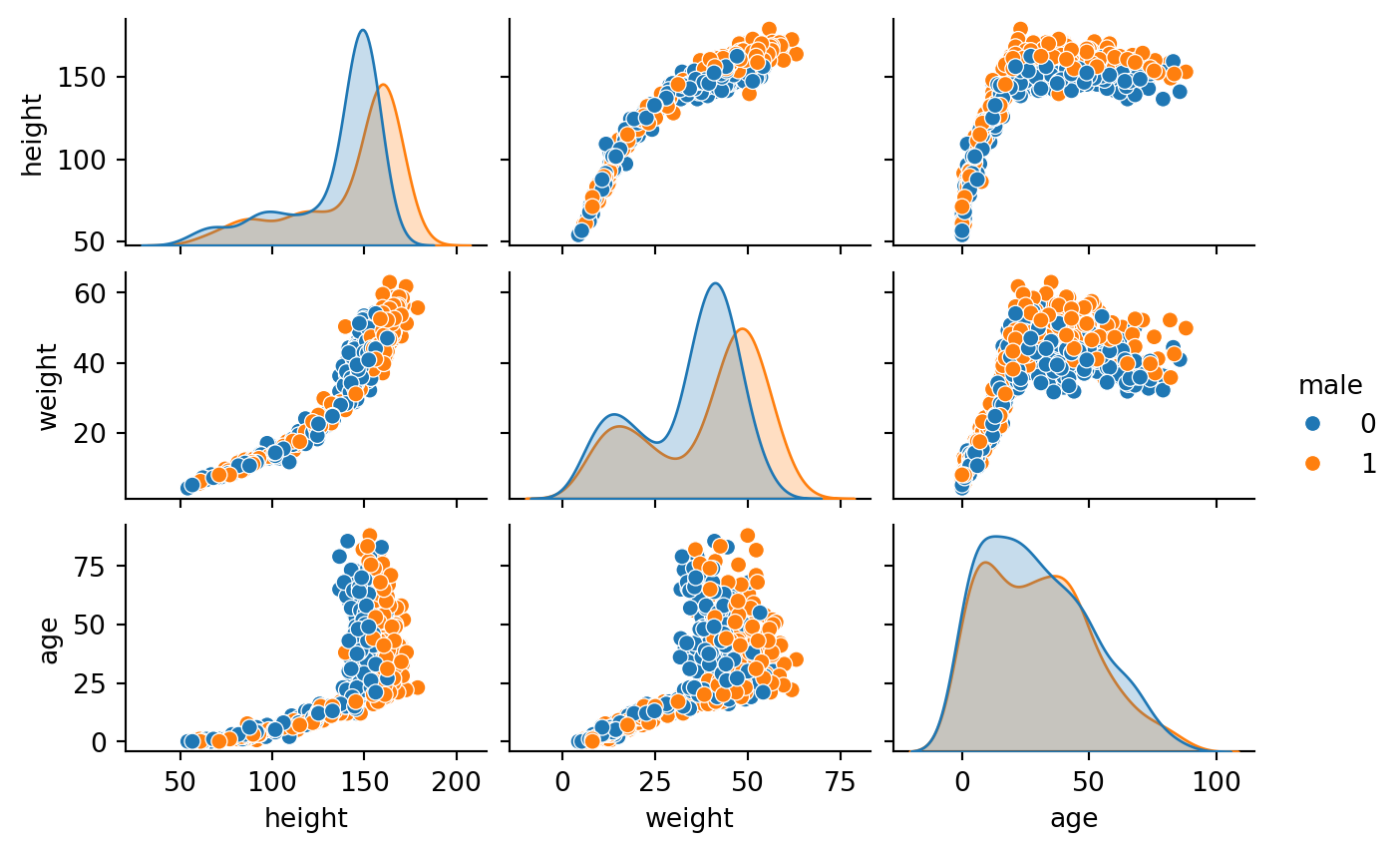
Exploratory data analysis
Les données
Chargement du jeu de données 1
#| echo: falseimport pandas as pddf_howell1 = pd.read_csv("./Data/Howell1.csv", sep=";")df_howell1.head(5)
height
weight
age
male
0
151.765
47.825606
63.0
1
1
139.700
36.485807
63.0
0
2
136.525
31.864838
65.0
0
3
156.845
53.041914
41.0
1
4
145.415
41.276872
51.0
0
Cas pratiques
Exploratory data analysis
Les données
import seaborn as snssns.pairplot(data= df_howell1, hue="male", height=1.5, aspect=1.5)
Cas pratiques
Estimation de paramètres
Premier problème
Question : Peut-on prédire le poids à partir de la taille après 18 ans ?
Préparation des données :
# select observation based on age >= 18data_sup18 = df_howell1[df_howell1.age>=18].copy()# Center height -> intercept = weight at mean heightcenter =lambda x: x - x.mean() data_sup18["height_c"] = center(data_sup18.height)
Pour Numpyro
# create dict for inference with numpyrodat1 = {"height" : data_sup18.height_c.values,"weight" : data_sup18.weight.values}
Cas pratiques
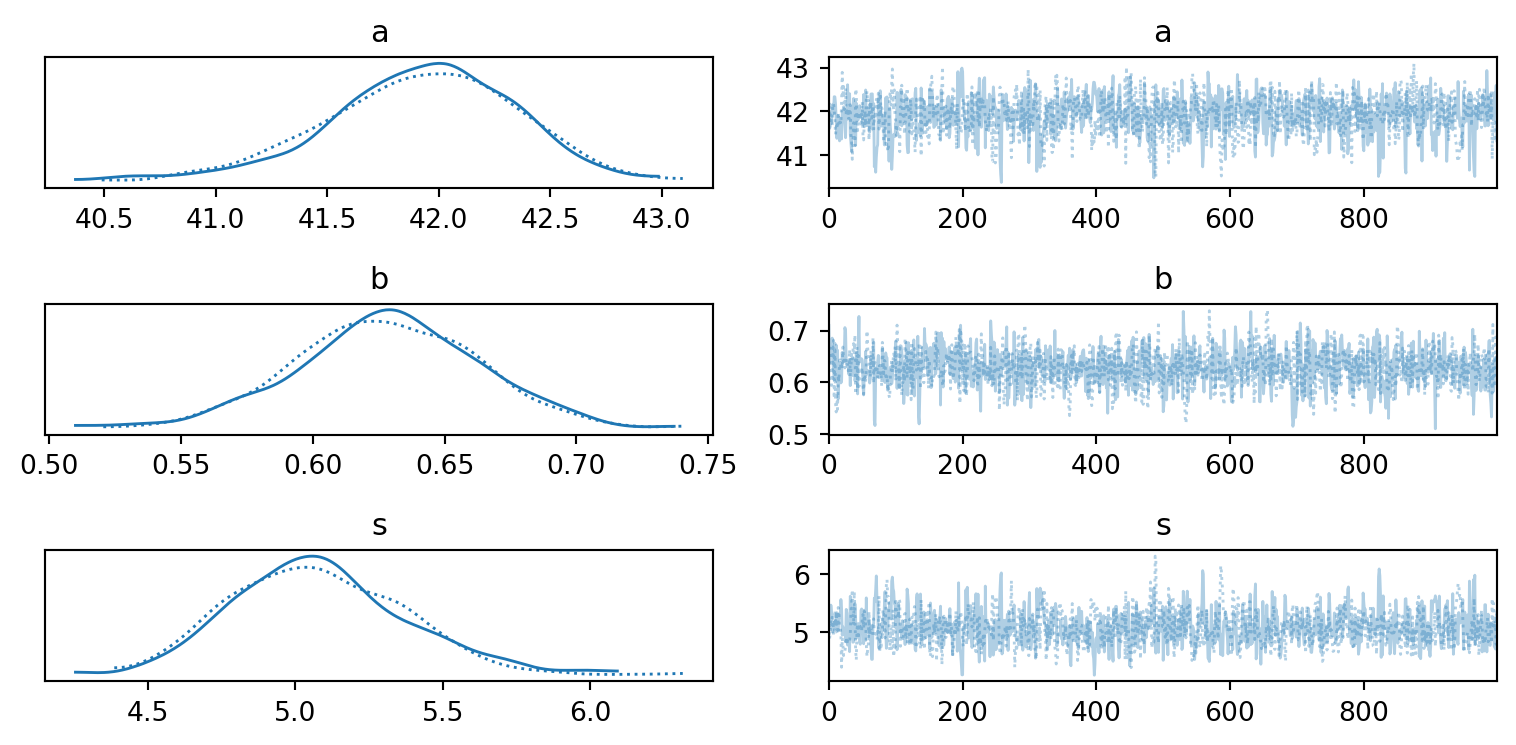
Estimation de paramètres
Peut-on prédire le poids à partir de la taille après 18 ans ?
Peut-on prédire le poids à partir de la taille après 18 ans ?
Vérification de la convergence de l’algorithme
Cas pratiques
Estimation de paramètres
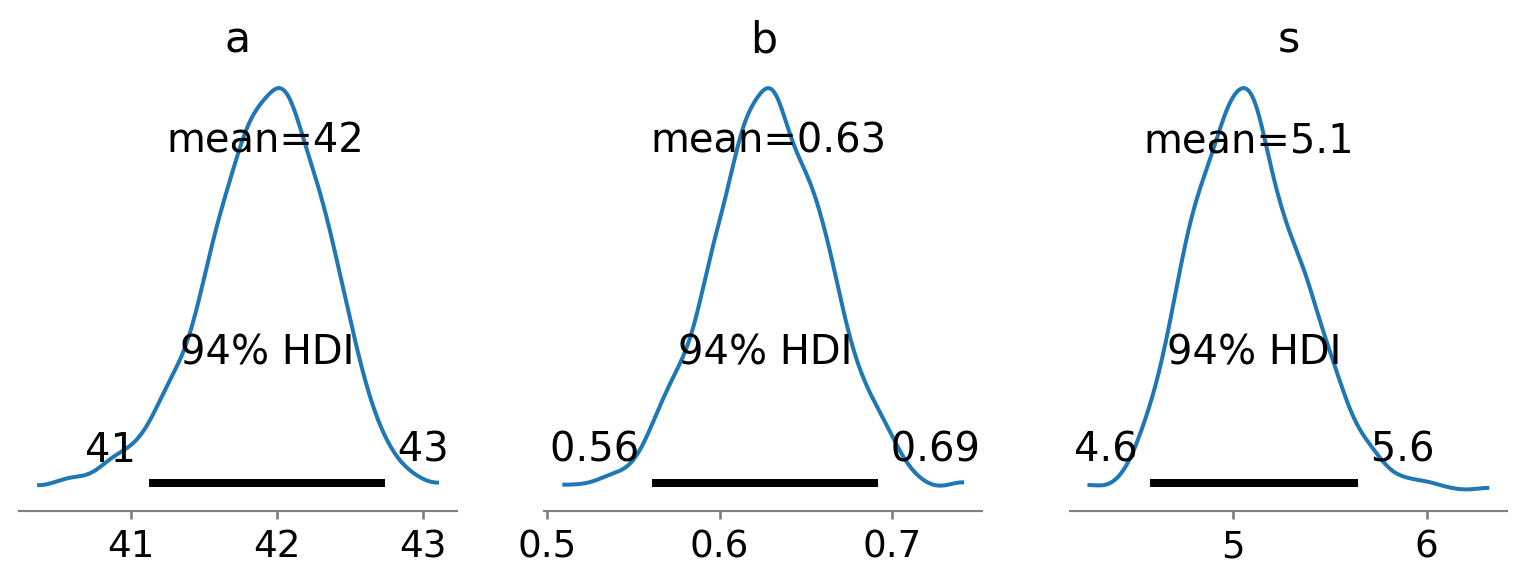
Peut-on prédire le poids à partir de la taille après 18 ans ?
Visualisation des résultats
az.plot_posterior(idata1, figsize=(10,3));
Cas pratiques
Estimation de paramètres
Peut-on prédire le poids à partir de la taille après 18 ans ?
Conclusion
mcmc1.print_summary(0.89)
mean std median 5.5% 94.5% n_eff r_hat
a 41.92 0.43 41.95 41.23 42.57 893.65 1.00
b 0.63 0.03 0.63 0.57 0.69 1176.63 1.00
s 5.08 0.29 5.06 4.65 5.56 824.26 1.00
Number of divergences: 0
On peut dire :
Pour la taille moyenne, le poids est de 41.89kg et à 89% dans [41.25, 42.59]
Pour chaque centimètre supplémentaire, le poids augmente de 630g
Cas pratiques
Test d’hypothèse
Deuxième problème
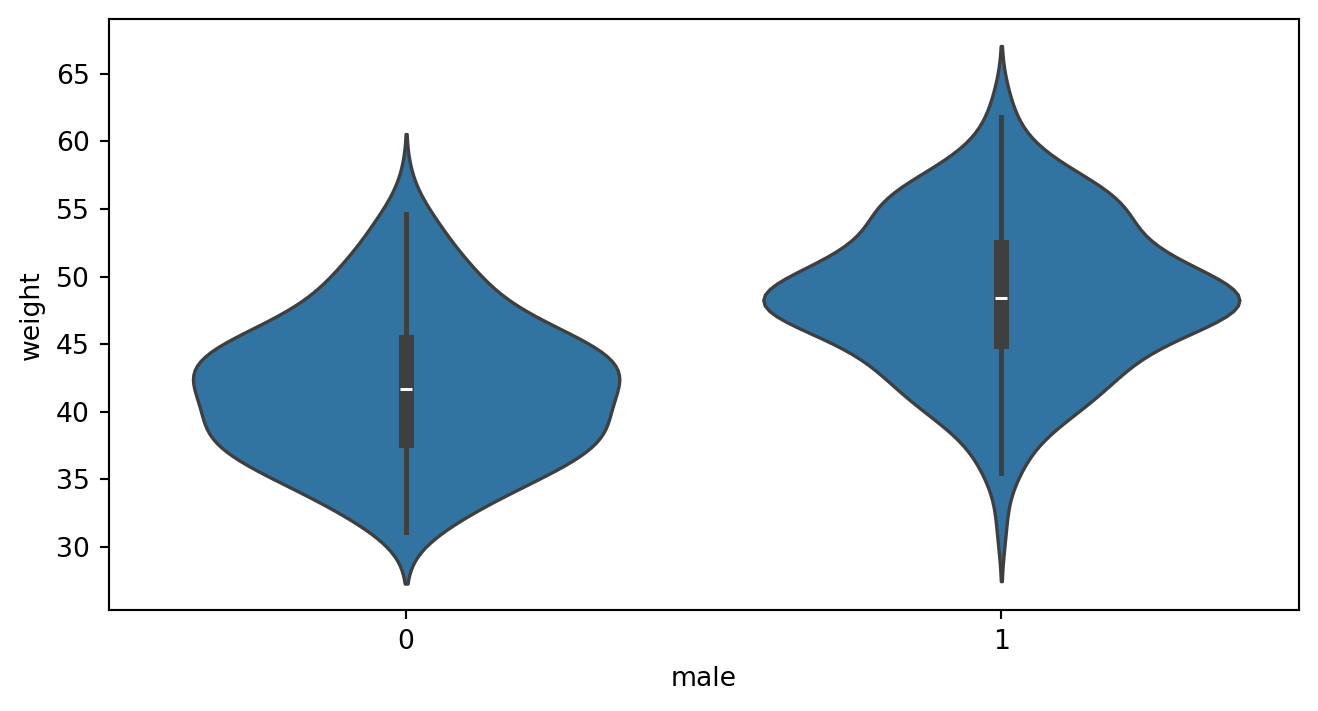
Question : Quelle est la différence de poids entre les hommes et les femmes après 18 ans ?
\(\alpha\) : c’est l’intercept mais il prend deux valeur, une pour les hommes et une pour les femmes. A noter que la distribution est une HalfNormal car les valeurs doivent être positives.
\(\sigma\) : c’est l’écart-type du modèle.
Cas pratiques
Test d’hypothèse
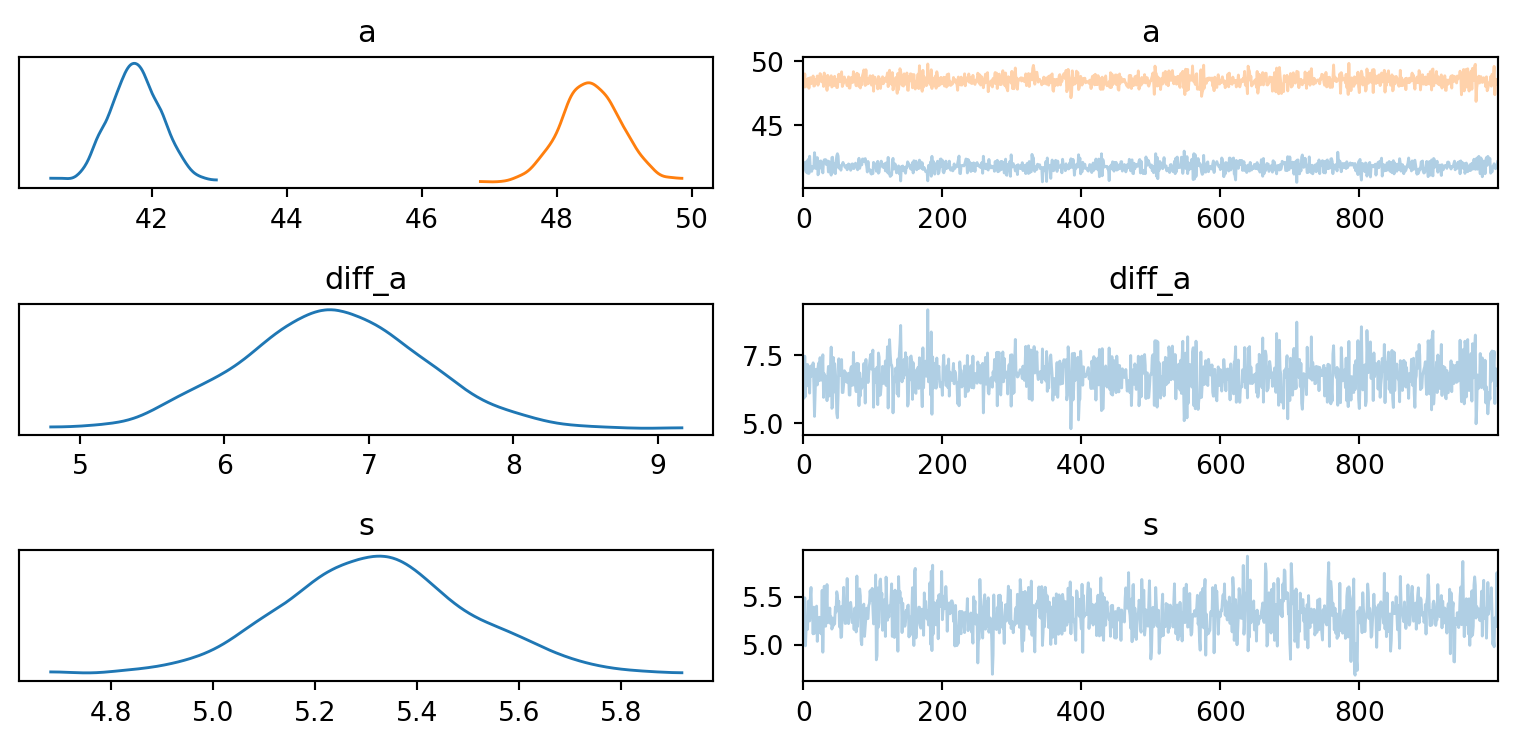
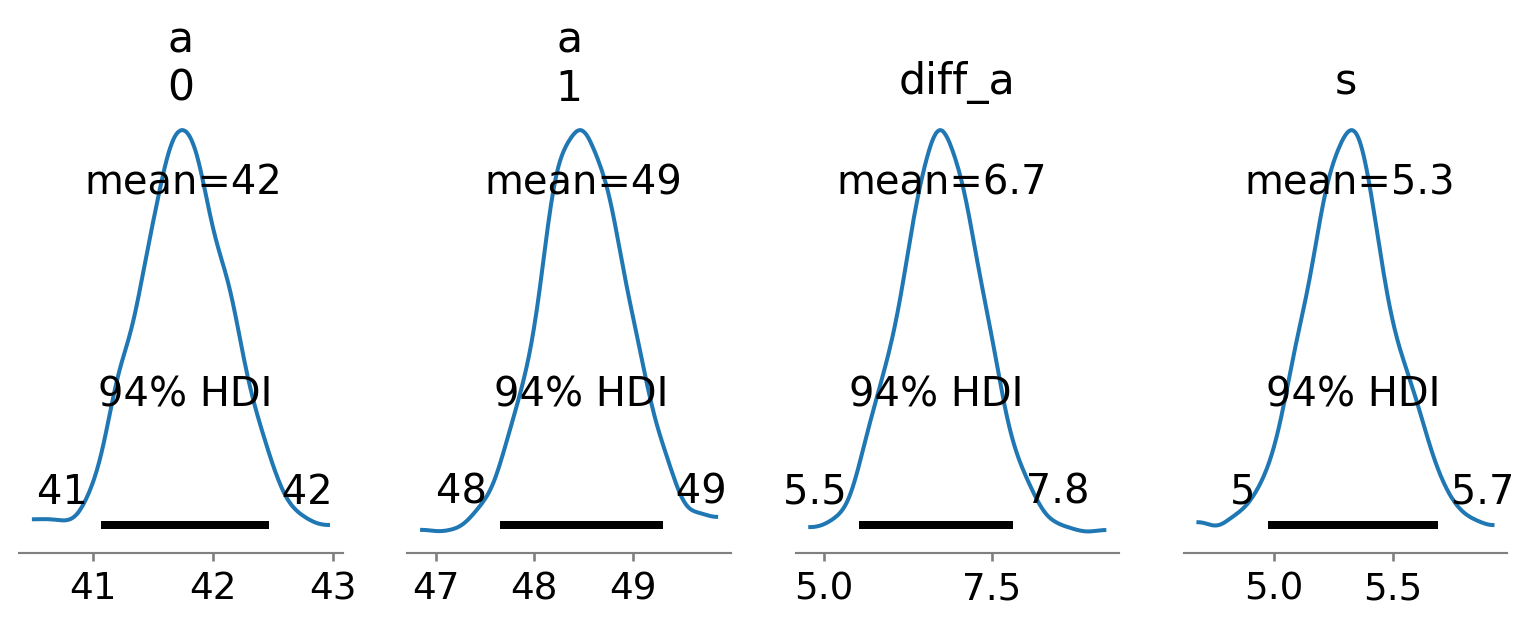
Différence de poids hommes/femmes après 18 ans ?
Implémentation du modèle
# create dict for inference with numpyrodat2 = {"male" : data_sup18.male.values,"weight" : data_sup18.weight.values}# Define the modeldef mdl2(male, weight=None):# Define priorwith numpyro.plate("male", 2): a = numpyro.sample('a', dist.HalfNormal(10)) s = numpyro.sample('s', dist.HalfNormal(1)) diff_a = numpyro.deterministic("diff_a", a[1]- a[0])# Define likelihood numpyro.sample("obs", dist.Normal(a[male], s), obs=weight)# plot modelnumpyro.render_model(mdl2, model_args=dat2.values(), render_distributions=True)
On peut dire que en moyenne la différence de poids entre les hommes et les femmes âgés de plus de 18 ans est de 6.7kg en faveur des homme et se touve à 89% dans [5.7, 7.6].
Cas pratiques
Comparaison de modèles
Troisième problème
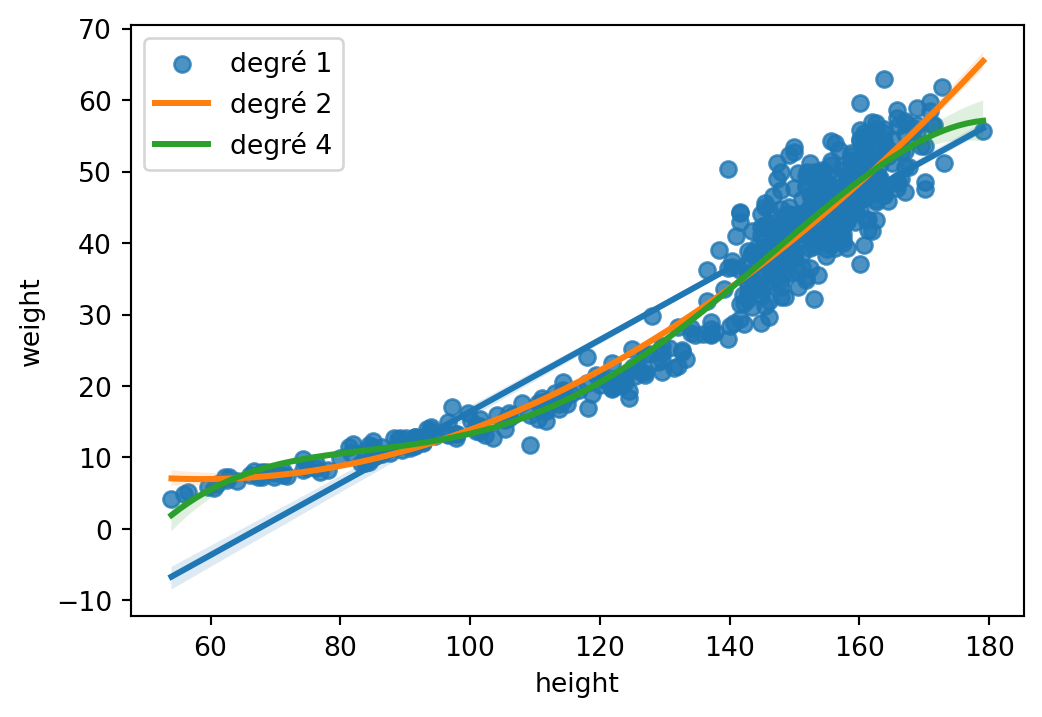
Question : Quelle est le meilleur modèle pour prédire le poids en fonction de la taille ?
Cas pratiques
Comparaison de modèles
Meilleur modèle pour prédire le poids en fonction de la taille ?
Modèle linéaire
# This time with all the datadf_howell1["height_c"] = center(df_howell1.height)dat3 = {"height" : df_howell1.height_c.values,"weight" : df_howell1.weight.values}# Define the modeldef mdl3a(height, weight=None):# Define prior a = numpyro.sample('a', dist.Normal(0, 10)) b = numpyro.sample('b', dist.Normal(0, 1)) s = numpyro.sample('s', dist.HalfNormal(1))# Define likelihood numpyro.sample("obs", dist.Normal(a+b*height, s), obs=weight)
Cas pratiques
Comparaison de modèles
Meilleur modèle pour prédire le poids en fonction de la taille ?
Meilleur modèle pour prédire le poids en fonction de la taille ?
Résultats modèle 1
mean std median 5.5% 94.5% n_eff r_hat
a 35.59 0.21 35.59 35.29 35.94 546.94 1.00
b 0.50 0.01 0.50 0.49 0.52 1096.92 1.00
s 4.90 0.14 4.91 4.68 5.13 707.60 1.00
Number of divergences: 0
Résultats modèle 2
mean std median 5.5% 94.5% n_eff r_hat
a 32.54 0.24 32.54 32.13 32.91 491.65 1.00
b1 0.64 0.01 0.64 0.63 0.66 361.61 1.00
b2 0.00 0.00 0.00 0.00 0.00 464.53 1.00
s 3.90 0.11 3.90 3.72 4.07 438.05 1.00
Number of divergences: 0
Résultats modèle 3
mean std median 5.5% 94.5% n_eff r_hat
a 2.07 0.22 2.04 1.72 2.39 2.63 2.35
b1 0.96 0.04 0.97 0.90 1.02 10.16 1.03
b2 0.04 0.00 0.04 0.04 0.04 37.28 1.08
b3 0.00 0.00 0.00 0.00 0.00 22.70 1.06
s 16.15 0.38 16.15 15.64 16.83 322.70 1.02
Number of divergences: 0
Cas pratiques
Comparaison de modèles
Meilleur modèle pour prédire le poids en fonction de la taille ?
Comparaison des trois modèles
rank
elpd_waic
p_waic
elpd_diff
weight
se
dse
warning
scale
mdl quardatic
0
-1520.482383
3.661986
0.000000
9.451997e-01
20.961410
0.000000
False
log
mdl linear
1
-1649.165739
3.452056
128.683357
5.480026e-02
14.919656
16.243557
False
log
mdl cubic
2
-2416.594966
3.611887
896.112584
8.177216e-09
19.680995
22.601487
True
log
En pratique, le meilleur modèle est le modèle construit sur les deux premiers modèles, linéaire et quadratique, proportionnellement à leurs poids respectifs.
Plan du cours
Contexte
L’inférence bayésienne
Cas pratiques
Pour aller plus loin
Les livres
Les packages par langage
Pour aller plus loin
Les livres
Plutôt pour les psychos
Livre complet qui décrit l’ensemble des cas auxquels vous serez confrontés. A lire !
Livre excellent accompagné de viséos très claires. Je recommande surtout pour l’analyse causale qui est fondamentale.
Pour aller plus loin
Les livres
Plutôt pour python
Livre facile à comprendre qui met l’accent sur le package pymc. A lire si vous voulez utiliser ce package !
Livre excellent qui apporte une autre perspective et des graphisme chatoyants ;-).
Pour aller plus loin
Les livres
Plutôt théoriques
Livre théorique support de Stan, le package de référence tous langages confondus. Ardu à lire mais vraiment intéressant
Livre théorique qui étend la cadre probabiliste du psychologue en l’intégrant dans une démarche plus généraliste de machine learning.
Pour aller plus loin
Les packages
En python
C’est le package que je recommande pour commencer. Il est complet et permet de faire toutes les analyses que l’on veut. Il est un peu lent mais peut-être couplé avec jax qui est plus puissant.
Bambi est un package qui s’utilise conjointement avec Pymc et qui apporte la syntaxe que l’on retrouve dans R.
Pour aller plus loin
Les packages
En python les mastodontes
L’intérêt de ces deux packages est qu’ils s’ouvrent sur les réseaux de neurones…
Pyro et Numpyro sont développés par Uber. Ils sont hyper puissants tout en gardant une certaine simplicité d’utilisation. Numpyro est plus simple et repose sur Jax.
TensofFlow Probability est le package développé par Google. Les classes qui décrivent les distributions de probabilités ont été reprises par Pyro et Numpyro. C’est assez complexe !
Pour aller plus loin
Les packages
En R
BRMS est le package de référence en R.
Pour aller plus loin
Les packages
En Julia
Julia est un “nouveau langage” que je conseille vivement. Il s’apprend comme python ou R mais la syntaxe n’a pas hérité de dizaine d’années de modifications ce qui la rend simple et efficace.
Pour les curieux, Turing est un package vraiment complet. On peut écrire des modèles comme avec BRMS et la puissance de julia fait le reste… Si vous hésitez alors celui-là mérite tout votre intérêt